
국내 연구팀이 로봇에 다기능 전자 시스템을 결합하여, 주변 환경을 실시간으로 모니터링하고 상황에 맞게 대응할 수 있도록 구현했다. 이번 연구 성과는 기존 소프트 로봇의 기능을 확장할 뿐 아니라, 무독성 소재를 활용한 환경 모니터링, 의료 임플란트 등에 새로운 활용 가능성을 제시할 것으로 기대된다.
고려대학교(총장 김동원) KU-KIST 융합대학원 융합에너지공학과 황석원 교수 연구팀이 다양한 움직임을 가역적으로 프로그래밍할 수 있는 자기 소프트 로봇(magnetic soft robot)을 개발했다.
이 연구는 재료 분야의 국제 학술지 Nano-Micro Letters (IF=31.6) 에 2월 17일(월) 온라인 게재됐다.
*논문명: Wireless, Multifunctional System-Integrated Programmable Soft Robot
*DOI: 10.1007/s40820-024-01601-3
소프트 로봇(soft robot)은 기존의 딱딱한 강체(rigid body) 로봇과 달리, 유연하고 신축성 있는 소재를 활용하여 다양한 임무를 수행할 수 있도록 설계된 로봇이다. 다만, 기존의 공압식·유압식(pneumatic/hydraulic) 방식은 외부 시스템에 의존해야 하는 한계가 있어 완전한 자율이 어려웠다. 이를 해결하기 위해 자극 응답성 고분자(stimuli-responsive polymer)를 활용한 연구가 진행되고 있지만, 현재까지는 단순한 형태 변화와 반복 움직임 구현에 머물러 있다.
이에 황석원 교수 연구팀은 강자성체(Ferromagnetic) 입자를 대두(Soybean) 왁스로 코팅한 자기 복합소재(Magnetic Composite)를 개발하여, 45℃의 낮은 온도에서도 다양한 움직임을 가역적으로 프로그래밍할 수 있도록 했다. 이를 통해 높은 열에너지를 사용하지 않고도 로봇의 움직임을 조정할 수 있으며, 열 손상도 방지했다.
연구팀은 자기 소프트 로봇에 박막형 무선 전자 시스템을 정밀하게 결합하여, 기존 유연 전자(Soft Electronics) 시스템이 갖는 제약을 극복했다. 최적화된 설계를 통해 로봇의 이동성과 기능을 저해하지 않으면서도, 다양한 센서(Sensor)를 작동시킬 수 있도록 했다. 이 시스템은 무선으로 전력을 공급받아 온도, 빛, 변형, 자이로센서 등의 센서를 작동하며, 열과 빛을 이용한 자극(Stimulation) 기능도 수행할 수 있다. 또한, 실시간으로 측정된 데이터를 무선으로 전송할 수 있어 로봇의 안정적인 움직임과 다양한 전자적 기능 수행이 가능함을 입증했다.
최종적으로 연구팀은 인공 장애물 코스를 활용해 개발된 자기 소프트 로봇의 임무 수행 능력을 실험적으로 검증했다. 로봇은 다양한 형태의 장애물을 효과적으로 탐색하며, 무선 전력 전송을 통해 실시간으로 전기적 기능을 안정적으로 수행했다.
황석원 교수는 “이번 연구는 소프트 로봇의 기존 한계를 뛰어넘어 기능적 확장을 이루었으며, 환경 모니터링, 웨어러블디바이스, 의료용 임플란트 등 다양한 응용 분야에서 활용될 가능성을 보여준다”라며 “특히, 소형화·고도화된 차세대 소프트 로봇 시스템 개발의 중요한 기술적 초석이 될 것”이라고 말했다.
이번 연구는 한국연구재단 개인기초연구사업 및 전자약 기술개발사업, 정보통신기획평가원 ICT 명품인재양성사업 및 실험실 특화형 창업선도대학 사업의 지원을 받아 수행됐다.
▲ (왼쪽부터) 고려대 황석원 교수(교신저자), 고려대 한성근 박사과정 (제1저자), 고려대 신정웅 박사(제1저자), 고려대 이중훈 박사(제1저자)
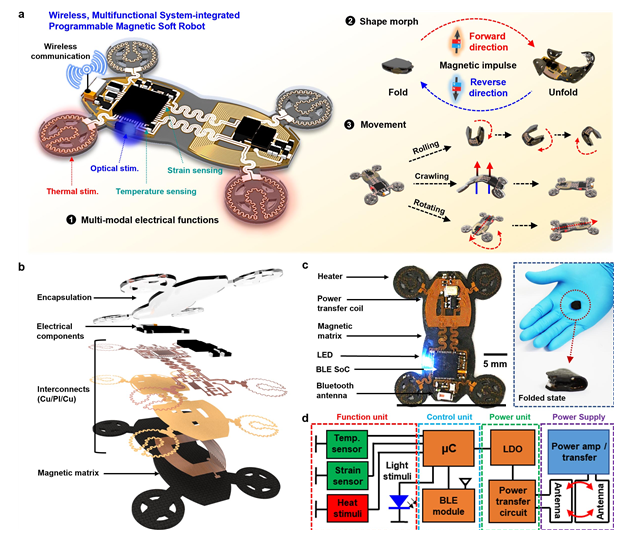
▲ 그림1. a. 무선 다기능 전자 장치를 갖춘 통합형 자기 소프트 로봇의 개략도. b. 통합형 자기 소프트 로봇 시스템의 분해도. c. 통합형 자기 소프트 로봇의 이미지. d. 전체 전자 시스템의 블록 다이어그램.
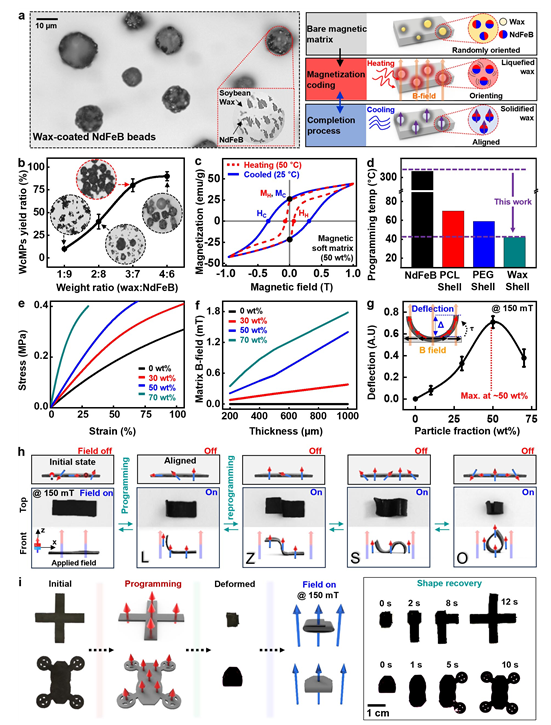
▲ 그림2. a. 대두 왁스로 코팅한 NdFeB 입자(WcMPs)의 광학 이미지 (왼쪽) 및 재프로그래밍 가능한 자기화 전략 (오른쪽). b. 대두 왁스와 NdFeB 입자의 혼합비에 따른 거동. c. 자기 소프트 로봇의 자기적 특성. d. NdFeB 및 다른 고분자가 코팅된 자기 입자와 WcMPs의 자기화 온도 비교. e. WcMPs의 함량에 따른 소프트 로봇의 기계적 성질. f. WcMPs의 함량 및 소프트 로봇의 두께에 따른 자체 자기장 강도. g. WcMPs 함량에 따른 자기 소프트 로봇의 구동 성능 평가. h. 외부 자기장에 의해 유도된 자기 소프트 로봇의 가역적인 다양한 모드의 형태 변형 능력. i. 복잡한 구조로 변형된 자기 소프트 로봇의 형태 복구 능력.
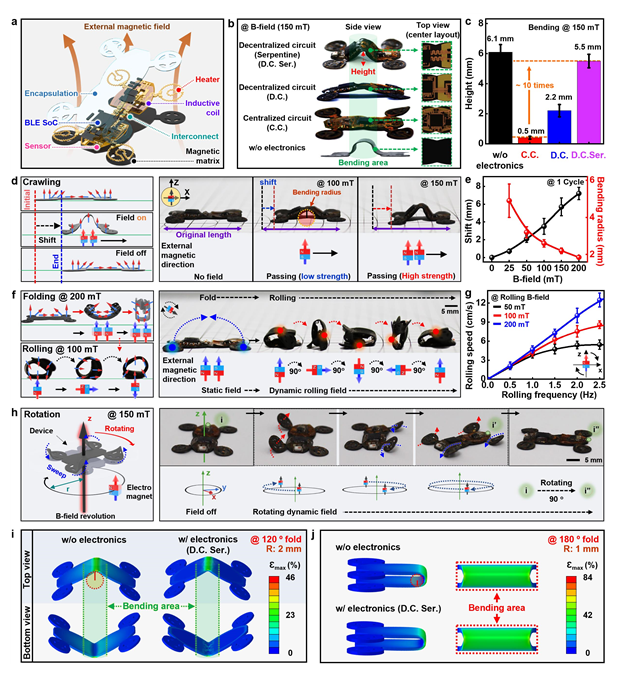
▲ 그림3. a. 다양한 전자 기능과 다채로운 모드의 이동을 구현할 수 있는 시스템 통합형 자기 소프트 로봇의 개략도. b,c. 통합된 전자 시스템의 레이아웃에 따른 자기 소프트 로봇의 크롤링 성능 비교 (b) 및 변형 거동 평가 (c). d. 외부 자기장 변화에 따른 시스템 통합형 자기 소프트 로봇의 크롤링 운동. e. 외부 자기장 변화에 따른 이동 거리 및 굽힘 반경 변화. f. 외부 자기장 모드에 따른 시스템 통합형 자기 소프트 로봇의 접힘 및 롤링 운동. g. 외부 자기장의 주파수 조절에 따른 로봇의 롤링 속도. h. 다양한 자기장 모드를 활용한 시스템 통합형 자기 소프트 로봇의 회전 및 방향 전환 운동. i. 시스템 통합형 자기 소프트 로봇의 크롤링 운동 시 발생하는 변형 분포 분석. j. 시스템 통합형 자기 소프트 로봇의 접힘 운동 시 발생하는 변형 분포 분석.
[관련기사]